Projects with Visual Demo (Robotics + Simulation, or GUI)
Simulation-Driven Web Game (Stealth project; WIP)
A real-time, military-themed, multiplayer, semi-automation/incremental webgame. Designed for maintainability, expandability, and performance — built entirely from scratch with no templates.
I designed and implemented both front-end and back-end systems, including user authentication, language localization, and gameplay logic — all while self-learning full-stack development and Vue.
- Vue 3 + Vite: Reactive front-end framework with lightning-fast build system
- TypeScript: Static typing for code robustness and maintainability
- Pinia: Centralized state management for UI/data sync
- BEM CSS: Structured CSS for consistent styling
- UI/UX design: Custom layout for dashboard and card interface
- Node.js: Server logic and API endpoints
- MongoDB Atlas: Cloud-hosted database for users, teams, and game state
- JWT Auth: Secure user authentication
- CORS config: Safe cross-origin API calls
- WebSocket: Real-time multiplayer chat and game state updates
- Axios: Standard API requests
- Browser storage: Persistent user settings and localization
- Jest: Unit tests
- GitHub Actions: CI/CD
- Core game design: Real-time sim engine, progress bars, idle/active hybrid
- Anti-hacking logic: Defensive coding and validation
- User system: Account, login, progress tracking
- Resource system: Mining, construction, conversion, storage
- Dashboard: Teams, missions, reports
- Design thinking: Future-proofing, reusability, coherence
- vibe-coding: Accelerated development using code suggestions
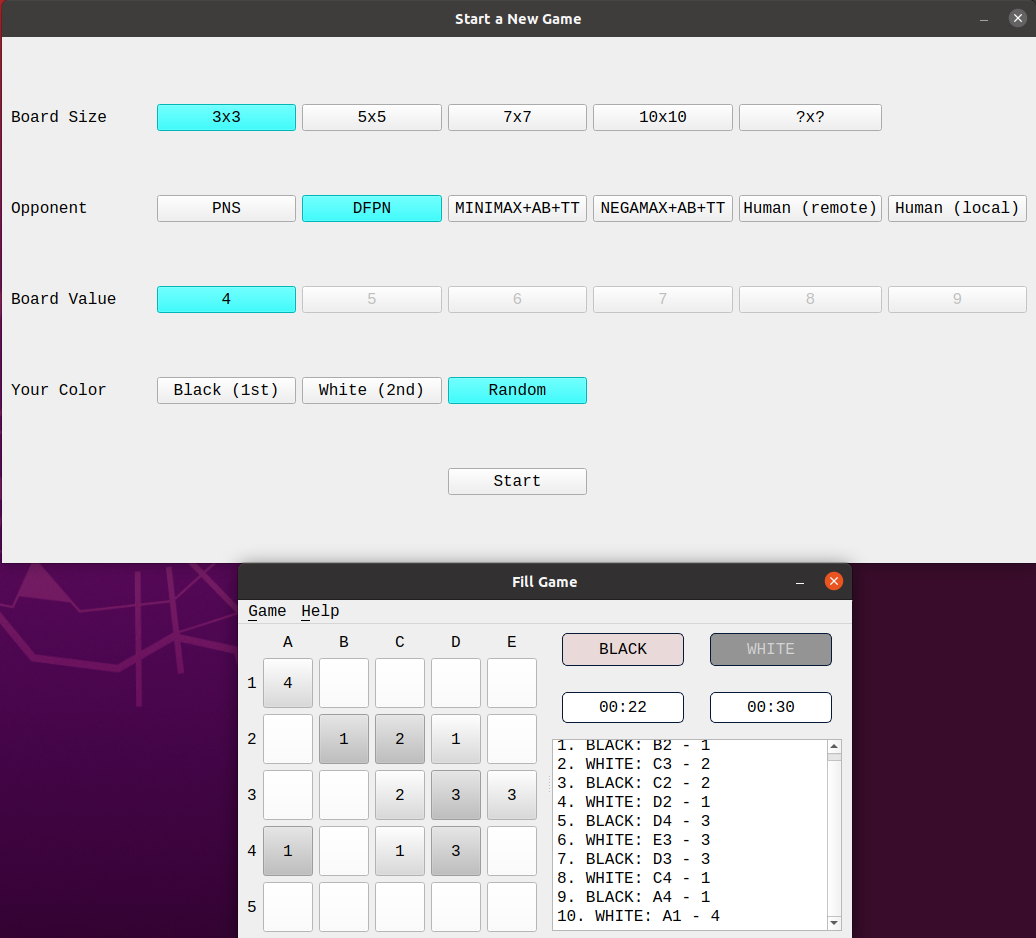
Fill-Game, with AI Opponents [GitHub] [report]
A two-player, adversarial version of Fillomino—built with heuristic search algorithms to support both PvE (Human vs. AI) and PvP (Human vs. Human) play.
Implemented in modern C++ (with a Qt GUI), and featuring a variety of search strategies—Depth-First Proof Number Search (DFPN), Proof Number Search (PNS), Minimax & Negamax (each with alpha-beta pruning and transposition tables), plus Monte Carlo Tree Search (MCTS).
- C++ 20
- Qt (cross-platform GUI)
- DFPN, PNS: Strategic search planning
- Minimax / Negamax w/ alpha-beta pruning & transposition tables
- MCTS: Probabilistic, long-horizon planning
- Cross-machine & local play
- Unit tests & performance tuning
- Profiler: Valgrind, KCachegrind
Reinforcement Learning: IRB2600 Welding Task Simulation
A simulation of an ABB IRB2600 robot executing a welding operation in a virtual environment. The project focused on task-specific motion planning, welding path generation, and fine-tuning joint trajectories for smooth and accurate operation.
Combined industrial simulation software with scripting to automate and visualize welding processes before deployment. I also benchmarked reinforcement learning approaches — Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC) — to evaluate their performance in learning efficient welding paths.
- RL Algorithms: PPO, SAC
- Python: Welding path scripting, RL benchmarking
- Lua: Custom motion control in CoppeliaSim (V-REP)
- CoppeliaSim (V-REP): Kinematics and task validation
- Ubuntu: Development and runtime environment
Dual Simulation: IRB2600 with ABB RobotStudio and CoppeliaSim (V-rep)
A simulation project demonstrating motion planning and execution for the ABB IRB2600 industrial robot arm. Developed using a mix of scripting and simulation tools to bridge virtual prototyping with real-world robotics workflows.
The work included creating robot motion sequences, integrating with ABB RobotStudio for visualization, and using CoppeliaSim (formerly V-REP) for simulation and control logic testing on Ubuntu.
- Python: Control scripts and data handling
- Lua: Embedded scripting for CoppeliaSim (V-REP)
- ABB RobotStudio: Industrial robot simulation and programming
- CoppeliaSim (V-REP): Physics-based robot simulation
- Ubuntu: Development and runtime environment
OMPL LazyPRM Obstacle Avoidance
A motion planning demo using the Open Motion Planning Library (OMPL) with the LazyPRM algorithm to navigate around obstacles. Demonstrates efficient graph-based planning for environments with complex geometry.
- OMPL: LazyPRM motion planning
- Python: Planning orchestration and visualization
- Ubuntu: Development and runtime environment
Husky UGV — Teleop & Camera Perception (Gazebo + RViz)
A simulation and control stack for Clearpath’s Husky UGV: keyboard teleoperation in Gazebo with live camera streams visualized in RViz. Includes topic wiring, launch files, and a minimal perception pipeline for testing navigation behaviors in a sandboxed environment.
- ORB_SLAM3: localization and mapping
- ROS: node graph, topics, launch files
- Gazebo: physics simulation, Husky model/plug-ins
- RViz: visualization (camera/image topics, TF, robot model)
- teleop_twist_keyboard: WASD keyboard control
- Camera input: Gazebo camera / USB cam via
image_transport - Ubuntu: development & runtime
- rosbag: data capture & replay (optional)
- URDF/Xacro: robot model tweaks (optional)
BobaTron — Bubble Tea Self-Serving Machine [report]
Fully automated, tablet-operated bubble tea machine integrating dispensing, assembly/delivery, power, micro-controller, and user interaction subsystems. Built to cut wait time and ensure taste consistency, with precise feedback-controlled dispensing and contact-less mixing.
Highlights: load-cell feedback loop with pumps & Archimedes screw for accurate dosing; orbital shaker for hygienic mixing; tablet UI with Wi-Fi control; multi-Arduino network over I²C. The prototype meets key specs and produces a drink in ~70 seconds; the milk module actively cools from ~9.5 °C to ~3 °C in ~25 minutes.
- Control: Multi-Arduino network (I²C), ESP32 Wi-Fi server, tablet UI
- Dispensing: Diaphragm & peristaltic pumps, Archimedes screw, load-cell feedback
- Assembly/Mixing: Conveyor & cup dispenser, orbital shaker (contact-less)
- Power/Thermal: Regulated DC rails, Peltier cooling with temperature feedback
- Performance: ≈70 sec/drink;
- Cost: Prototype ≈ C$1,500 (under C$4,000 target)
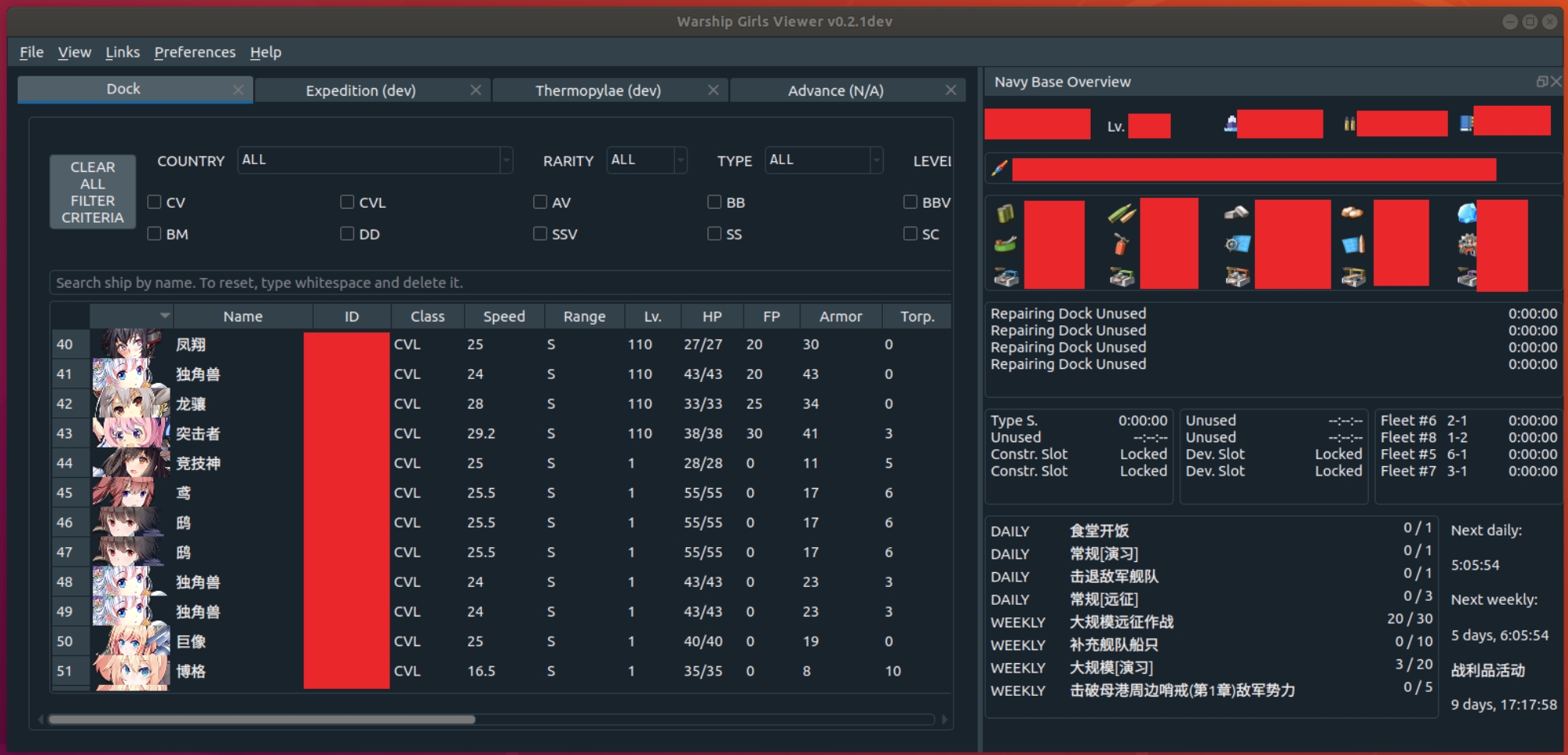
WGViewer — Game Automation & GUI Tool [GitHub] [More Screenshots]
Developed a cross-platform GUI tool for Warship Girls, a popular mobile game in Asia, enabling advanced automation and in-depth game data management. The project reverse-engineered and integrated with the game’s API to provide full automated gameplay, equipment management, and resource optimization features. Achieved 50,000+ downloads from Chinese gaming forums.
- GUI Development: Built an intuitive, cross-platform interface using PyQt.
- Game API Reverse Engineering: Automated gameplay, resource/equipment tracking, and event handling.
- Automation Engine: Designed routines for fully unattended daily tasks, battles, and upgrades.
- Version Management: Created modular architecture to quickly adapt to frequent game updates.
- CI/CD: Set up GitHub Actions for automated builds and releases.
- Asset Organization: Structured resources for images, configs, and logs for maintainability.
- Performance Optimization: Improved memory and network efficiency for long-running sessions.
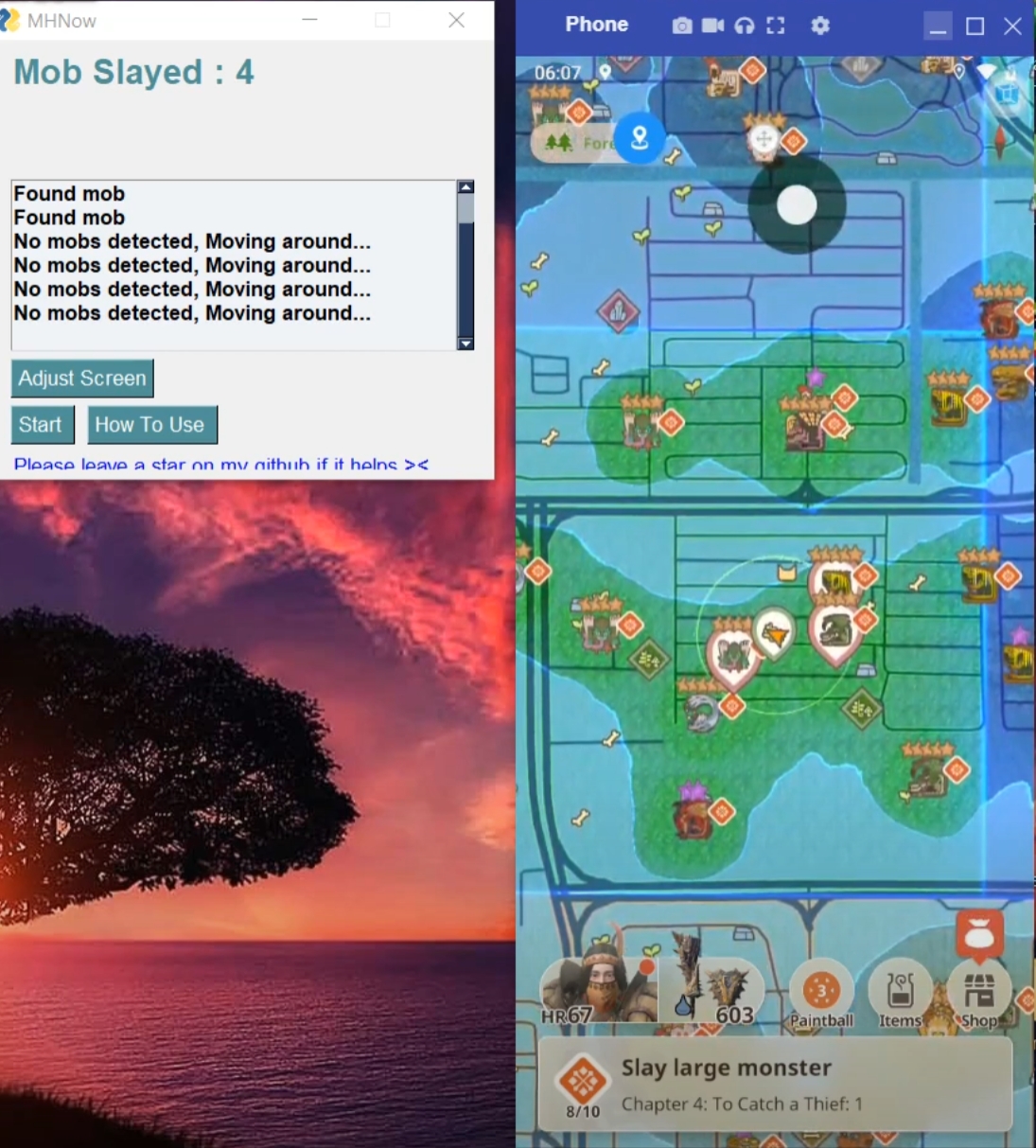
Mobile Game Automation & Reverse Engineering [GitHub]
A personal deep-dive into automation and memory-level reverse engineering of a real-time AR ARPG, Monster Hunter NOW (from Pokemon Go company). Explored mobile system behavior, game memory, and scripting logic.
- OpenCV + Vysor: Vision-based automation of hunting flows
- Python Scripting: Real-time control logic for timing, items, decisions
- Rooted Android: Elevated permissions for GPS spoofing
- GameGuardian: Address-based memory inspection for weapon stats
- APK reverse engineering: Decompiled client for hidden assets/keys (educational)
The system could hunt all monsters automatically. I was among the earliest to reach max level and a complete weapon collection via scripting and reverse engineering.